...
ARM Server satisfies the Arm Server Ready certified.
Software Perequisites
...
item | method | |
|---|---|---|
robox | robox is an Android container. | 1. Log in to the server via SSH and enter the command line execution entry. 3. Download the robox source code package and switch to the release-phase2.3 branch. git clone https://github.com/lag-linaro/robox.git -b release-phase2.3 The robox source code directory is: /home/ubuntu/robox
If the source code download fails, use the following command to skip verification: export GIT_SSL_NO_VERIFY=1 ) |
robox Compile and run dependent packages | Dependent packages are packages that support robox compilation and operation. Before robox compilation, all dependent packages need to be installed. |
apt-get install build-essential cmake cmake-data debhelper dbus google-mock libboost-dev libboost-filesystem-dev libboost-log-dev libboost-iostreams-dev libboost-program-options-dev libboost-system-dev libboost-test-dev libboost-thread-dev libcap-dev libdbus-1-dev libdbus-cpp-dev libegl1-mesa-dev libgles2-mesa-dev libglib2.0-dev libglm-dev libgtest-dev liblxc1 libproperties-cpp-dev libprotobuf-dev libsdl2-dev libsdl2-image-dev lxc-dev pkg-config protobuf-compiler |
docker run dependent packages | The installation is complete before configuring docker. |
apt-get install docker.io |
Database Perequisites
schema scripts: N/A
Other Installation Requirements
- Jump Host Requirements:N/A
- Network Requirements: The network connection is normal and can communicate with the external network.
- Bare Metal Node Requirements :N/A
- Execution Requirements (Bare Metal Only) :N/A
...
-
- Replace docker storage driver
Open a new window and perform the following operations.
1. Log in to the server via SSH and enter the command line execution entry.
2. View docker information.docker info
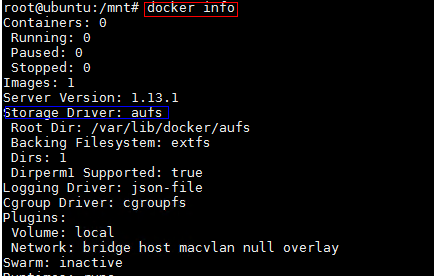
- 3. Modify the version of the storage driver.
- If the "storage driver" version is "overlay", no adjustment is required.
If the version of "storage driver" is "aufs", you need to change "storage driver" from "aufs" to "overlay".1) Open the "/etc/default/docker" file.
vim /etc/default/docker
2) Add the following script.
DOCKER_OPTS= -s overlay
3)It will take effect after restarting docker or reboot.
/etc/init.d/docker restart
...
Incorporate Exagear transcoding patch
- Exagear module instruction translation software supports AArch32 feature of Kunpeng cloud mobile phone scene, and ensures 100% compatibility of AArch32 instruction application.
1. Create a directory.
mkdir -p /home/compiler2. Download the three source files of linux_4.15.0.orig.tar.gz, linux_4.15.0-65.74.diff.gz, linux_4.15.0-65.74.dsc, and put them into the "/home/compiler/" directory.
The physical machine kernel source code download address: https://launchpad.net/ubuntu/+source/linux/4.15.0-65.743. Enter the "/home/compiler/" directory.
cd /home/compiler/- ls
linux_4.15.0-65.74.diff.gz linux_4.15.0-65.74.dsc linux_4.15.0.orig.tar.gz
4. The source code directory linux-4.15.0 will be generated in the current directory.
dpkg-source -x linux_4.15.0-65.74.dsc
5. Please extract exagear-a32a64-docker.tar.gz to the /home/ directory, and rename the decompressed folder to exagear.
cd /home/tar zxvf exagear-a32a64-docker.tar.gz
mv "ExaGear ARM32-ARM64 for Android Docker" exagear //Rename the purpose: to facilitate subsequent use
cd /home/exagear
ls
android //安卓源码转码补丁
translator //物理机上用于转码的二进制可执行文件
kernel //物理机内核的转码补丁
6. Copy the transcoded patch to the kernel source directory.
cp /home/exagear/kernel/ubuntu-4.15.0-65.74.patch /home/compiler/linux-4.15.0/cd /home/compiler/linux-4.15.0/
patch -p1 <ubuntu-4.15.0-65.74.patch
...