The trend, key technologies and scenarios of VICS
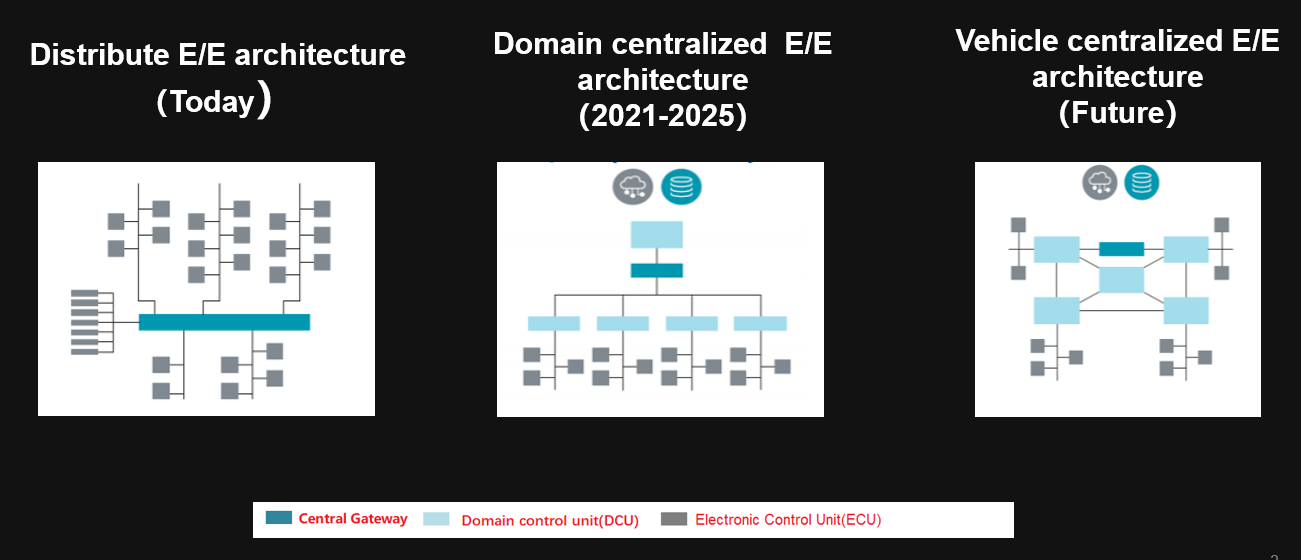
Intelligentization and networking promote the evolution of vehicle electronic and electrical architecture
Infrastructure required for Intelligent vehicle-infrastructure cooperation systems(I-VICS)
- Road: Informatization, intelligence and standardization
- Communication: Unified communication interface and protocol, coordinated vehicle-road interconnection
- Network: Car wireless communication network, narrowband Internet of Things
- Services: High-precision time-space reference services, vehicle emergency systems, rapid assisted positioning services
- Maps: basic maps and geographic information systems
- Data: big data cloud platform, software
Use case 1: Safety Of The Intended Functionality (SOTIF) and I-VICS
SOTIF(ISO/PAS 21448) emphasizes to avoid unreasonable risks due to expected functional performance limitations.
The background of the birth of SOTIF is the development of intelligent driving
If classified according to the functional chain of intelligent driving: perception-decision-execution, the "functional performance limitation" is reflected in three aspects:
- Sensor perception limitations lead to scene recognition errors (including missed recognition of driver misoperation)
- Insufficient deep learning causes the decision algorithm to judge the scene incorrectly (including the wrong response to the driver's misoperation)
- Actuator function limitations lead to deviation from the ideal target
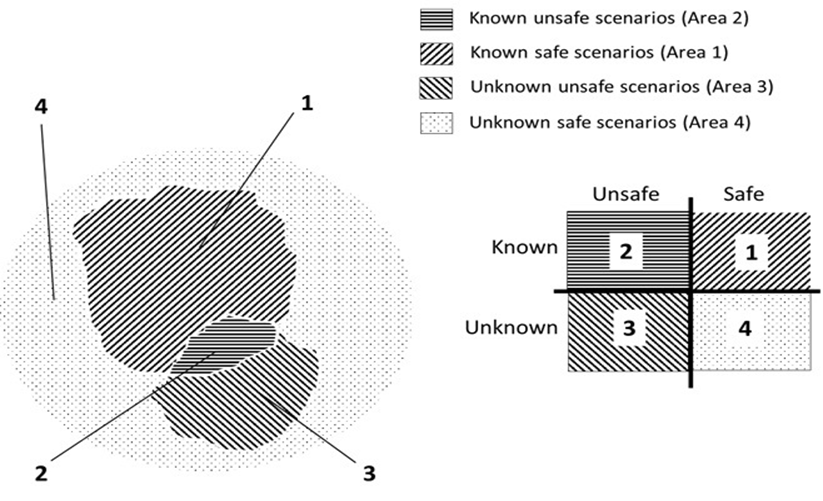
- For Area2 (known unsafe scenarios), the basic idea of SOTIF is to identify risk scenarios through safety analysis, and develop countermeasures against risk scenarios.
- For Area3 (unknown unsafe scenarios), various scenarios that a car may encounter under various road conditions need to be identified (in theory) in the early stage of development
Use case 2: Autonomous Valet Parking
Functions:
- Automatically drive a car from a pre-defined drop-off zone (e.g. the entrance to a carpark) to a parking spot indicated by an external system.
- Park a car in a parking spot, starting in a lane near that parking spot.
- Drive out of a parking spot.
- Drive to a pre-defined pick-up zone (e.g. the exit from a carpark).
- Automatically stop for obstacles while achieving the above.

AVP's New features / benefits based on I-VICS:
- Expand the perception range of car
- Improve the ability of perception and realize swarm intelligence
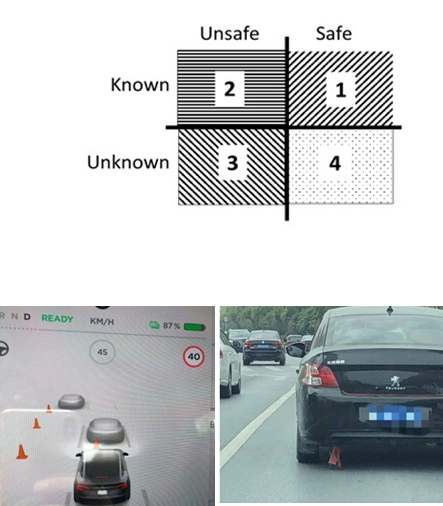
- Solve the problem of automatic driving safety
-Convert unsafe scenario to safe scenario
-Convert unknown scene to known scene