...
The diagram below shows the major components and relationships in a deployment of this blueprint.
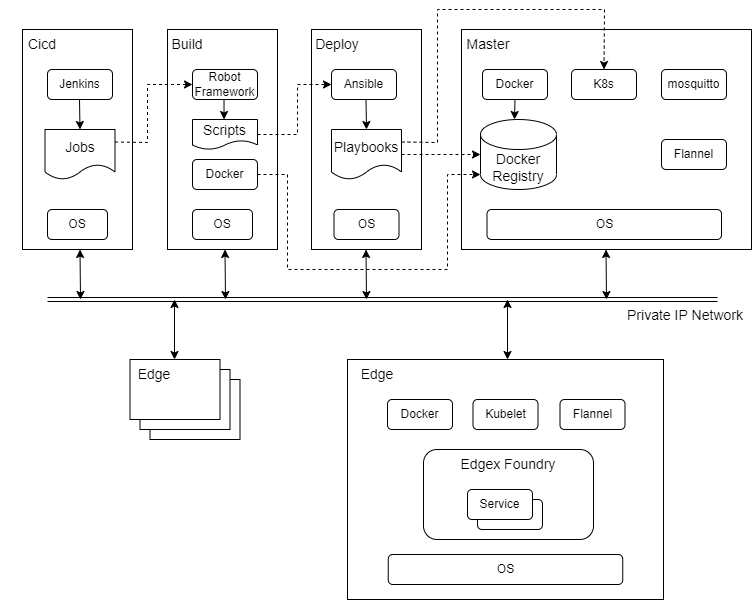
Deployment, as well as other tasks such as starting and stopping the cluster, is coordinated through a set of Ansible playbooks. (Ansible playbooks are a system used by the Ansible tool for describing the desired state of a system. In many ways they are similar to shell scripts. For more details see the Ansible documentation.) The playbooks are run exclusively by the deploy node and build node, and they execute commands on the deploy node, the master node, the build node, and in some cases on the edge nodes. Once the nodes are set up, most activity is carried out by Kubernetes. Kubernetes is configured by the playbooks and told to start or stop services on the edge nodes. These services are run in containers, and the images for these containers are stored in a local Docker registry. There are containers for the Kubernetes components themselves, plus Flannel (a component which provides networking inside the Kubernetes cluster), EdgeX Foundry services, and two four custom services (sync-app and image-app and device-lora and device-camera) built using the EdgeX SDKs.
Note that the build node and the deploy node and the master node can be the same host or virtual machine.
The sensor camera nodes are not shown in the above diagram as they are not envisioned as being connected to the network, and are not configured by the playbooks from the deploy node. See the Sensor Camera Nodes section of Installation for an example of how sensor camera nodes may be setup.
Pre-Installation Requirements
...
The table below shows the recommended minimum specifications for the hardware in the testing installation. It is possible that lower spec hardware could be used for many of the nodes. The sensor node hardware in particular is specific to the testing installation and could be swapped out with any number of other platforms as long as LoRa connectivity was possible using the hardware.
| Master, Deploy,Build | Edge | SensorCamera | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Platform | VM running on commercial grade PC | NVidia Jetson NanoRaspberry Pi 3 | H.View HV-500E6A | ||||||
| CPU | x86-64, Intel i5 or similar | ARM 64bit Cortex-A57ARM 32bit Cortex A-53 | N/A | ||||||
| Cores | 2 | 4* 2 cores should be possible 4* | N/A1 core should be possible | ||||||
| RAM | 4 GB | 2 GB1 GB | N/A | ||||||
| Storage | 128 GB Hard Disk space | 32 GB SD Card32 GB SD Card | N/A (SD card optional) | ||||||
| Network | 1x Ethernet | 1x Ethernet | 1x Ethernet**for provisioning | ||||||
| Other | LoRa | N/A | LRA-1 USB dongle | LoRa dongle (LRA-1 | USB dongleSensor | N/A | N/A | )* *Used in R6 configuration | ONVIF (Profile S, Profile T) supporting IP cameraDHT-11 GPIO temperature/humidity sensor |
At a minimum one node is required for the master and deploy and build roles together, and at least one two edge node and one sensor nodenodes and two camera nodes. The testing installation uses two edge and sensor camera nodes.
Network Requirements
...