Hechun Zhang Hao Zhongwang Zhuming Zhang
The edge will be deployed in RSU devices
In the aspect of road edge computing, the new road side system(RSU) in the future will integrate a variety of communication methods such as lte-v / 5G, provide a variety of sensor interfaces and local map system, provide signal timing information and surrounding moving target information, and provide vehicle collaborative decision-making and other technologies and capabilities to build a road side edge computing node. The coordinated driving of workshop (V2V) and vehicle road (V2I) can reduce the probability of accidents by means of accident warning and avoidance.

Use case 1: Safety Of The Intended Functionality (SOTIF)
SOTIF(ISO/PAS 21448) emphasizes to avoid unreasonable risks due to expected functional performance limitations.
The background of the birth of SOTIF is the development of intelligent driving
If classified according to the functional chain of intelligent driving: perception-decision-execution, the "functional performance limitation" is reflected in three aspects:
- Sensor perception limitations lead to scene recognition errors (including missed recognition of driver misoperation)
- Insufficient deep learning causes the decision algorithm to judge the scene incorrectly (including the wrong response to the driver's misoperation)
- Actuator function limitations lead to deviation from the ideal target
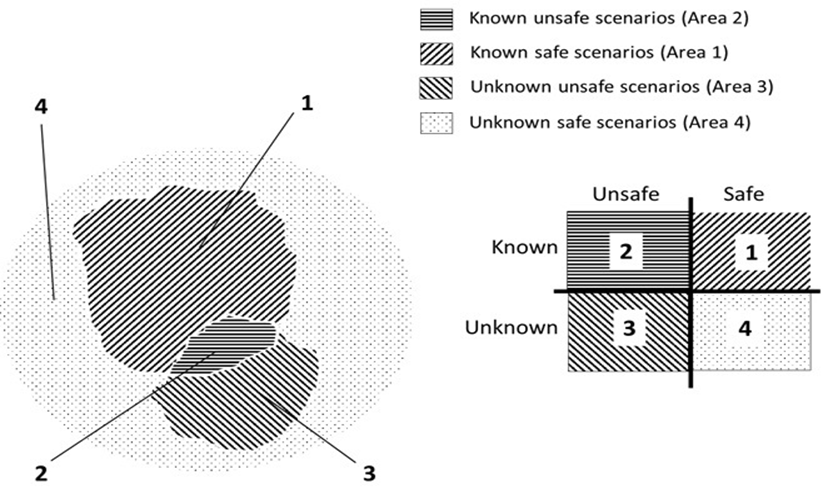
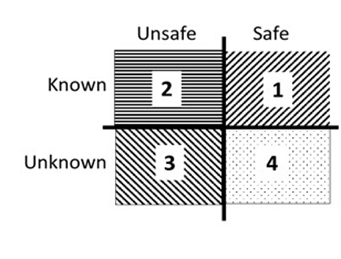

- For Area2 (known unsafe scenarios), the basic idea of SOTIF is to identify risk scenarios through safety analysis, and develop countermeasures against risk scenarios.
- For Area3 (unknown unsafe scenarios), various scenarios that a car may encounter under various road conditions need to be identified (in theory) in the early stage of development
Use case 2: Cooperative intelligent transportation system:vehicular communication data exchange system
Vehicle road collaboration platform integrates sensing, communication, computing, control and other technologies, based on standardized communication protocol, realizes mutual mapping between physical space and information space, including "vehicle, traffic, environment" and other elements, standardized interaction and efficient collaboration, and uses cloud computing big data capabilities to solve systematic resource optimization and configuration problems.
The platform provides dynamic basic data such as vehicle operation, infrastructure, traffic environment and traffic management for intelligent vehicle and its users, management and service institutions,Application scenario development, verification and commercial application of vehicle communication system based on various communication modes.
The vehicular communication data exchange system to support following functions:
No. | Classification | Communication | Application |
1 | Safety | V2V | Forward collision warning |
2 | V2V/N2I | Intersection collision warning | |
3 | V2V/N2I | Left turn assis | |
4 | V2V | Blind area warning / lane change assistance | |
5 | V2V | Reverse overtaking warning | |
6 | V2V-Event | Emergency braking warning | |
7 | V2V-Event | Warning of abnormal vehicles | |
8 | V2V-Event | Vehicle out of control warning | |
9 | V2I | Warning of road danger | |
10 | V2I | Speed limit warning | |
11 | V2I | Red light warning | |
12 | V2P/V2I | Collision warning for vulnerable traffic participants | |
13 | Efficiency | V2I | Green Wave Speed Guidance |
14 | V2I | In-vehicle signs | |
15 | V2I | Congestion alert ahead | |
16 | V2V | Emergency vehicle reminder | |
17 | Information service | V2I | Car near field payment |
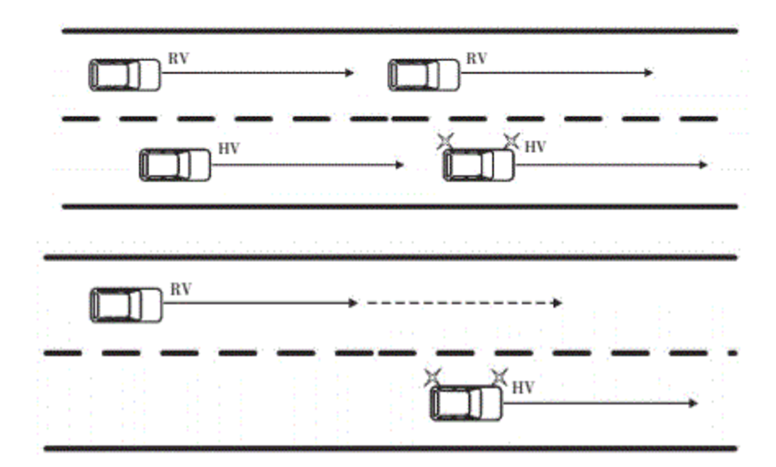
Function example:BSW/LCW
Blind spot warning/lane change warning
When the vehicle owner's adjacent lane has a distant vehicle (RV) driving in the same direction in the HV blind zone, BSW application will remind the HV driver; when the main vehicle (HV) is ready to implement lane change operation (such as activating the turn signal, etc.), if there is a distant vehicle (RV) driving in the same direction in the adjacent lane is in or about to enter the HV blind zone, LCW application will remind the HV driver Early warning. The application is applicable to the warning of collision risk of vehicles changing lanes on common roads or expressways.The application of BSW / LCW can avoid side collision with vehicles in adjacent lanes when changing lanes, and improve lane changing safety.
Use case 3: Autonomous Valet Parking
Autoware is the world's first "all-in-one" open-source software for self-driving vehicles hosted under the Autoware Foundation.
The Autoware.Auto project, based on ROS 2, is the next generation successor of the Autoware.AI project, based on ROS 1.
The major differentiators of Autoware.Auto compared to Autoware.AI are:
- Modern software engineering best practices including code reviews, continuous integration testing, thorough documentation, thorough test coverage, style and development guides
- Improved system architecture and module interface design (including messages and APIs)
- An emphasis on reproducibility and determinism at the library, node, and system levels
The Autonomous Valet Parking (AVP) demonstration uses Autoware.Auto to provide a valet parking service in the parking lot ODD.

Autonomous valet parking
The AVP demonstration uses Autoware.Auto to provide the following functions:
- Automatically drive a car from a pre-defined drop-off zone (e.g. the entrance to a carpark) to a parking spot indicated by an external system.
- Park a car in a parking spot, starting in a lane near that parking spot.
- Drive out of a parking spot.
- Drive to a pre-defined pick-up zone (e.g. the exit from a carpark).
- Automatically stop for obstacles while achieving the above.