Blueprint overview/Introduction
Autoware is the world's first "all-in-one" open-source software for self-driving vehicles hosted under the Autoware Foundation.
The Autoware.Auto project, based on ROS 2, is the next generation successor of the Autoware.AI project, based on ROS 1.
The major differentiators of Autoware.Auto compared to Autoware.AI are:
- Modern software engineering best practices including code reviews, continuous integration testing, thorough documentation, thorough test coverage, style and development guides
- Improved system architecture and module interface design (including messages and APIs)
- An emphasis on reproducibility and determinism at the library, node, and system levels
Zhuming Zhang Hechun Zhang Hao Zhongwang
Use Case
Safety Of The Intended Functionality (SOTIF)
SOTIF(ISO/PAS 21448) emphasizes to avoid unreasonable risks due to expected functional performance limitations.
The background of the birth of SOTIF is the development of intelligent driving
If classified according to the functional chain of intelligent driving: perception-decision-execution, the "functional performance limitation" is reflected in three aspects:
- Sensor perception limitations lead to scene recognition errors (including missed recognition of driver misoperation)
- Insufficient deep learning causes the decision algorithm to judge the scene incorrectly (including the wrong response to the driver's misoperation)
- Actuator function limitations lead to deviation from the ideal target
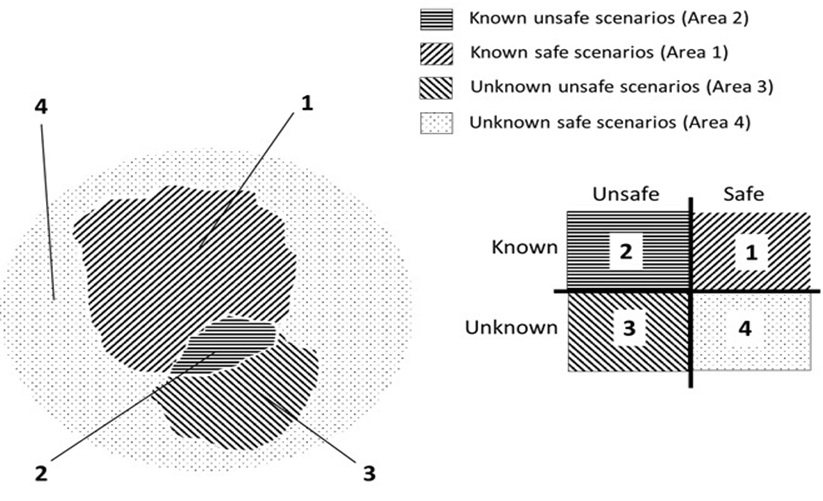
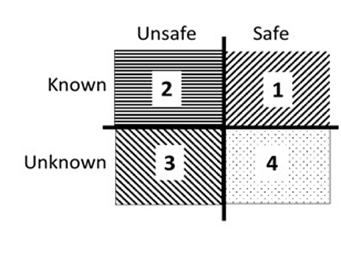

- For Area2 (known unsafe scenarios), the basic idea of SOTIF is to identify risk scenarios through safety analysis, and develop countermeasures against risk scenarios.
- For Area3 (unknown unsafe scenarios), various scenarios that a car may encounter under various road conditions need to be identified (in theory) in the early stage of development
<use case 2>
Autonomous Valet Parking
The Autonomous Valet Parking (AVP) demonstration uses Autoware.Auto to provide a valet parking service in the parking lot ODD.

Autonomous valet parking
The AVP demonstration uses Autoware.Auto to provide the following functions:
- Automatically drive a car from a pre-defined drop-off zone (e.g. the entrance to a carpark) to a parking spot indicated by an external system.
- Park a car in a parking spot, starting in a lane near that parking spot.
- Drive out of a parking spot.
- Drive to a pre-defined pick-up zone (e.g. the exit from a carpark).
- Automatically stop for obstacles while achieving the above.
<use case 3>
Where on the Edge
Business Drivers
Overall Architecture
<This could inform the non-technical audience, but now is more geared towards a more engaged, technical audience>
< Blue print's relation to Akraino generic architecture, how it relates to it >
< This section will use the Akraino architecture document as reference>
System architecture for the AVP ODD
The system architecture that was developed to address the AVP ODD in Autoware.Auto is given below:

Autoware.Auto AVP Architecture
Prerequisites
To run this demo, you will need to provide the following.
- A point cloud map of a carpark, for localisation.
- A HDMap (vector map) of a carpark, for navigation.
- A simulated world of a carpark, if the demo will be run on a simulator.
- A simulated version of your car.
A sample carpark is available, based on a real single-level carpark in San Jose, California.
A sample car is available, based on a real-life vehicle used by many members of the Autoware Foundation.
Platform Architecture
<Hardware components should be specified with model numbers, part numbers etc>
The physical AVP demo was tested with a Lexus RX 450h with
- the Pacmod 3.0 DBW interface
- 2 Velodyne VLP-32Cs
- an AutonomouStuff Spectra industrial PC.
- the AutonomouStuff Speed and Steering Control (SSC) software.
Software Platform Architecture
<Software components with version/release numbers >
AVP Simulation
The simulation AVP demo was tested with hardware that satisfies requirements for the LGSVL simulator. To run the LGSVL simulator, you will need an NVIDIA graphics card. Additional information about requirements can be found here.
<EDGE Interface>
<ETSI MEC Interaction>
APIs
APIs with reference to Architecture and Modules
High Level definition of APIs are stated here, assuming Full definition APIs are in the API documentation
Hardware and Software Management
Licensing
GNU/common license