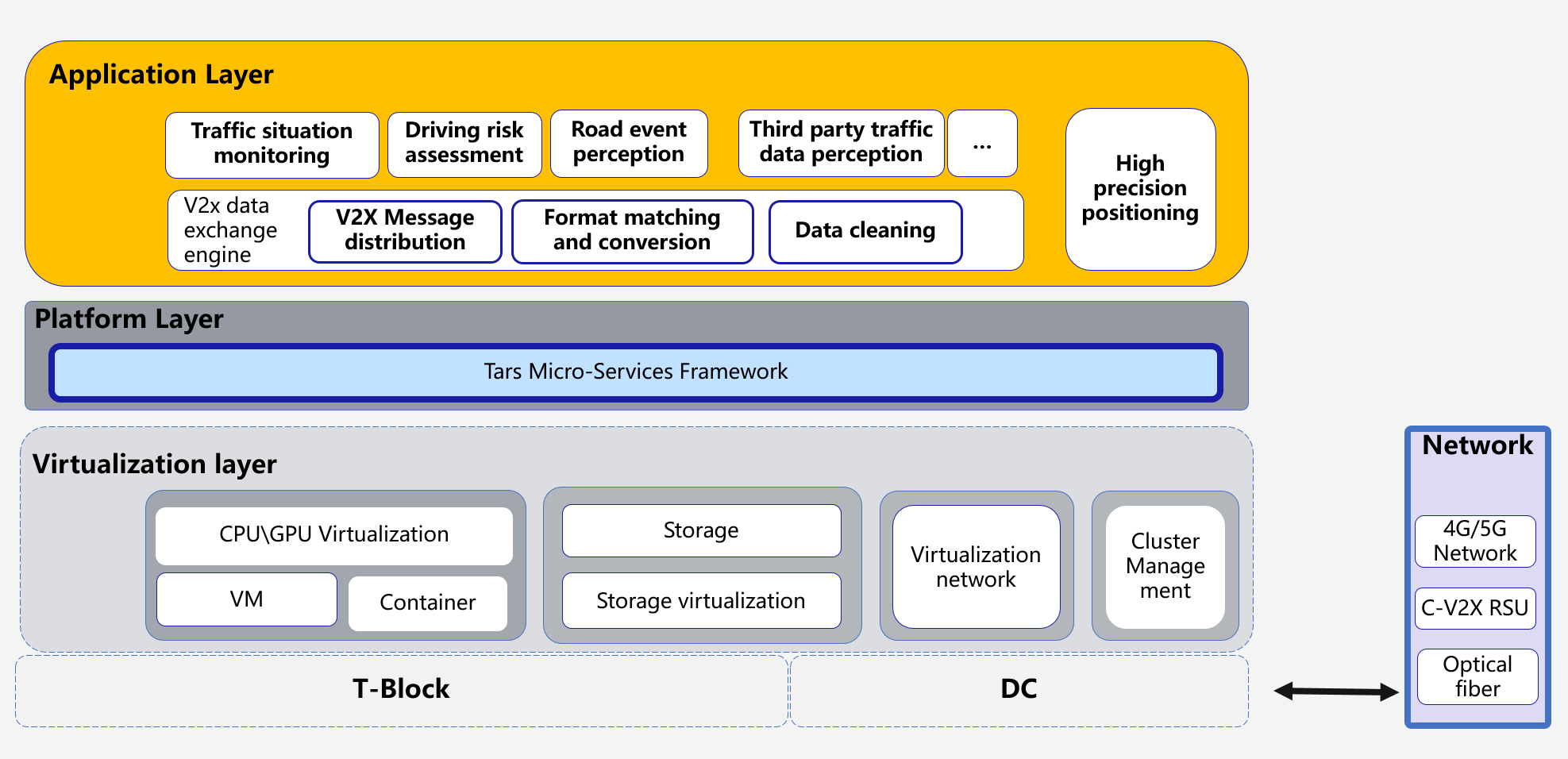
The following picture depicts the application architecture of the Connect Vehicle Blueprint, which consists of the following key components:
- Commodity Hardware, Arm/X86 Physical Server.
- Virtualization Layer.
- Tars Microservice Platform layer.
- Connected Vehicle Applications layer.
The following picture depicts test demo for CVB:
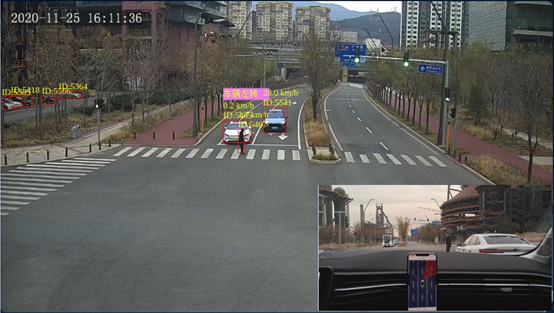
Based on road sensing system (such as cameras), connected vehicles achieve a closed loop of information by 4G/5G network or RSUs. The edge cloud is also interconnected with the central cloud to achieve diversified functional module deployment. The powerful computing power of the central cloud is used to support complex data processing (for example, the traffic brain), and realize the integration of vehicle-road-cloud-network coordination. Edge cloud infrastructure can improve the information processing capabilities of existing roadside infrastructure. By deploying AI processing workstations in the edge cloud infrastructure, each target in the road covered by the road-side camera can be directly analyzed. Its main functions include:
1) Target recognition and detection: Recognize and detect road targets (including vehicles, pedestrians, throwing objects, accidents, etc.);
2) Target tracking: accurate tracking of road targets, in the case of multiple cameras shooting the same target, to achieve unique target identification and de-duplication tracking;
3) Positioning: real-time location positioning for road targets, and extraction of the target's driving speed and direction information;
4) Cloud GNSS high-precision positioning: based on the original GNSS observations monitored by the non-dedicated RTK chip terminals in a connected vehicle, the edge cloud realizes the cloud high-precision positioning calculation, and distributes the results to the connected vehicle. The non-dedicated RTK chip terminals can greatly improve the accuracy without increasing the cost of the terminal.
5) Abnormal scene recognition: The identified scenes include emergency braking, parking, abnormal lane change, driving in the opposite direction, vulnerable traffic participants, throwing objects, lane-level congestion, etc.
Connected vehicles receive real-time road participant status information, road information and warning information detected by the cloud through TAI vehicles and WeChat applets, and combine their own positioning and status data to identify specific traffic scenarios and conduct risk assessments. At present, it has covered some of the application scenarios, and includes: forward collision warning, emergency braking warning, reverse driving warning, abnormal vehicle warning, road danger warning, collision warning for vulnerable traffic participants,etc.