By Tao Wang
Tencent Future Network Lab, one of the laboratories for the Tencent which focuses on 5G and intelligent transport research, standardization and commercial rollout, has provided commercialized 5G Cooperative Vehicle Infrastructure System(CVIS) relies on road-side unit (RSU) , road sensing equipment (such as cameras) and 5G base stations to realize the information closed-loop among its connected vehicles. In addition, the edge cloud computing of the system is connected to a central cloud (traditional data center) through public or dedicated network lines (such as 4G/5G, CPE or carriers’ special lines), which brings large-scale network coverage with a 5G base station, makes up the lack of network coverage in roadside infrastructure, and leverages the integration of a vehicle-road-cloud-network by using the computing power of the central cloud.
Edge cloud computing infrastructure can improve data processing capacity of existing roadside infrastructure. With the deployment of an AI processing workstation, the edge cloud infrastructure can analyze all the object i.e. traffic participants & events via the video captured by road-side camera and other sensor equipment including vehicles, pedestrians, traffic accidents, etc.
The main functions are as follows:
1)Object recognition and detection: recognizes and detects road traffic participants and events including vehicles, pedestrians, scatters, traffic accidents, etc.
2)Object tracking: tracks road objects accurately, recognizes and excludes duplicated tracking when multiple cameras capture the same target within overlapped area.
3)Location, velocity & direction: locates the objects in real- time and calculate its speed and direction.
4)GNSS high precision positioning: based on the original GNSS position measured by the vehicle, the edge cloud can realize high- precision positioning without a special RTK terminal. Additionally, the positioning result can be delivered to connected vehicles and other modules of the edge cloud to determine the scene which would trigger certain CVIS functions and service functions. Compared to the conventional approach using GPS as a positioning reference, the accuracy is greatly improved without increasing the cost.
5)Abnormal scene recognition: Recognition of scenes as shown in the following figures includes emergency braking, parking, abnormal lane change, left turn, reverse driving, large trucks, vulnerable traffic participants, scatters and lane level-congestion, etc.

Visual recognition of emergency breaking
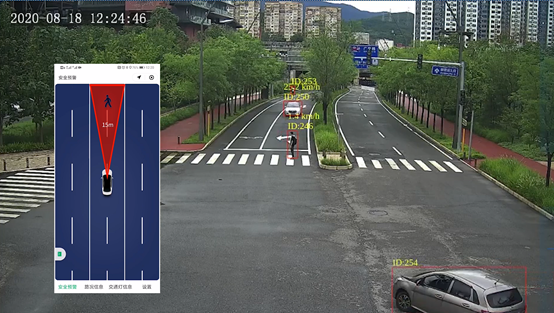
Visual recognition of vehicle left turn
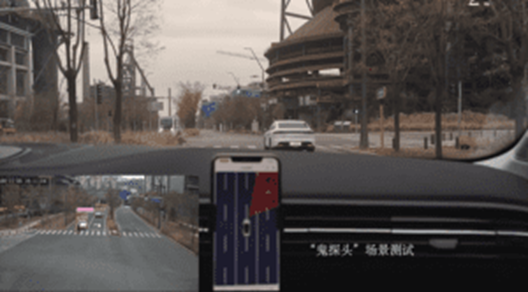
Visual recognition of vulnerable traffic
In Tencent’s Cooperative Vehicle Infrastructure System’s open platform for edge cloud and central cloud systems, we built a vehicle-road cooperative edge computing platform with good ecological openness based on Tencent’s cloud-edge collaborative system coined TMEC (Tencent MEC). TMEC is complied with the latest 5G standards specified by 3GPP and where Tencent Future Network Lab have contributed more than 400 standard contributions on 5G V2X, MEC and other technical area like cloud-based multimedia services since 2018.
Functionality includes:
1)Flexible integration of third- party system: the platform is completely decoupled from but friendly to integration with third-party systems. Within the system, the raw data from road side collected by roadside infrastructure can be directly delivered to third- party systems via senseless forwarding. In addition, edge cloud and center cloud connect with third-party systems (such as traffic monitoring center) through specific open data interfaces. The edge cloud can share the structured v2x information with third-party systems, while the center cloud can provide big data interface to third-party system and also provide big data processing and analysis functions for third-party applications.
2)Seamless connection to 5G / V2X network: the platform supports the connected vehicle’s service deployed by edge cloud to seamlessly connect to a 5G / V2X network, and it can simultaneously adapt v2x messages into standardized data format for transmission over 5G base station (Uu Interface) and C-V2X RSU (PC5 interface). Additionally, this platform can support 5G Internet of vehicles and cloud game business under a high-speed vehicle scenario, using the latest 5G network slice technology which can be activated by application and device location. AI-based weak network detection and MEC resource scheduling for Internet services and other technologies have been adopted in the platform to achieve seamless integration for 5G/V2X. The platform adopts Tencent’s innovated micro service framework to realize service-oriented governance of edge cloud businesses for the third-party. The micro service framework has been adopted by 3GPP as one of the four main solutions of 5G core network service architecture evolution (eSBA) (the other three are traditional telecom equipment provider solutions) and has been partially adopted by 3GPP standards TS23.501 and TS23.502.
3)Low-cost: due to the openness of the platform, it can make full use of the existing infrastructure and flexibly aggregate information from a third-party system and then reduce the cost for customers. The current system integrates Intel’s low-cost computing hardware in the edge cloud, which reduces the computing power cost by 50% and reduces the energy consumption of the edge cloud by 60%. In addition, by using a cloud-based GNSS high-precision positioning approach, compared to the traditional RTK solution, the cost of connecting vehicle terminals can be reduced by about 90%. The solution slightly reduces the positioning accuracy but still meeting the requirements of lane level positioning.
To learn more about Akraino’s Connected Vehicle blueprint, visit the wiki here: https://wiki.akraino.org/pages/viewpage.action?pageId=9601601 .
2 Comments
Ike Alisson
In case people may have the ability to make/write comments/remarks, and in this way, share their knowledge/experience/provide info on updates/new specifications etc. to the content of the blog, it might be useful to define a Procedure regarding how these comments/remarks will be handled, in case that there will be a need to provide a reply and who shall be A) responsible "Author" of the reply and B) who shall be responsible to monitor and assess about the need to provide a reply and confirm that the "Task" is finalised. Just a suggestion from my side.
Ike Alisson
Thank you for your update Tao. It is appreciated. As the Solution with RSU is a previous release (specifying deployment7installation of RSU with a distance of 2km and time/clock synchonization), could you please be so kind to see (provide information in due time) about possible System update on the RAN (NR) and CN Features & functionalities (CN Capabilities to LADN for defined Service in a TA) as well as the idea to use Digital Twins but with a capability for an update of the "state" and inter-related of all the Twin clients and on the PCF defined which info shall be analysed locally (on the Edge) and which info/analysiswill be sent to the Cloud in the Central site, as well as on the Positioning and GNSS (when and how "Horizontal" and "Vertical" positioning related Methods shall be applied in combination with GNSS (MEO, LEO, MEO), plus that in the Service (Connected Vehicle), we shall not have "cars", but, as you rightly indicate "vehicles" (& pods) that are driverless and operating on a pre-determined route (Managed within the Network TA/NEST/SST). It will be appreciated if you could provide info related to updates incorporating these CN and RAN and Application Capabilities. Thank you. Sincerely yours, Ike