Connected Vehicle Blueprint(CVB) is an Akraino approved blueprint and part of Akraino Edge Stack. The project is completely focused on Connected Vehicle Application run on Edge Computing.
Use Case
The use cases for the Connected Vehicle Blueprint are itemized below. For R2, we release the Microservice Platform Tars, which supports the multiple connected vehicle application deployment/management/orchestration/monitor.
UseCases | value proposition |
Accurate Location | The accuracy of location improved by over 10 times than today's system. Today’s GPS system is around 5-10meters away from your reallocation, <1 meter is possible with the help of edge computing. |
Smarter Navigation | Real-time traffic information update, reduces the latency from minutes to seconds, figure out the most efficient way for drivers. |
Safe DriveImprovement | Figure out the potential risks which can NOT be seen by the driver. See below. |
Reduce traffic violation | Let the driverunderstand the traffic rule in some specific area. For instance, change the line prior to a narrow street, avoiding the opposite way drive in the one-way road, avoiding carpool lane when a single driver and so on. |
Overall Architecture
The following picture depicts the architecture of the Connect Vehicle Blueprint, which consists of the following key components:
- Commodity Hardware, Arm/X86 Physical Server.
- IaaS Software, like Openstack, IaaS and so on
- Tars Microservice Platform
- Connected Vehicle Applications
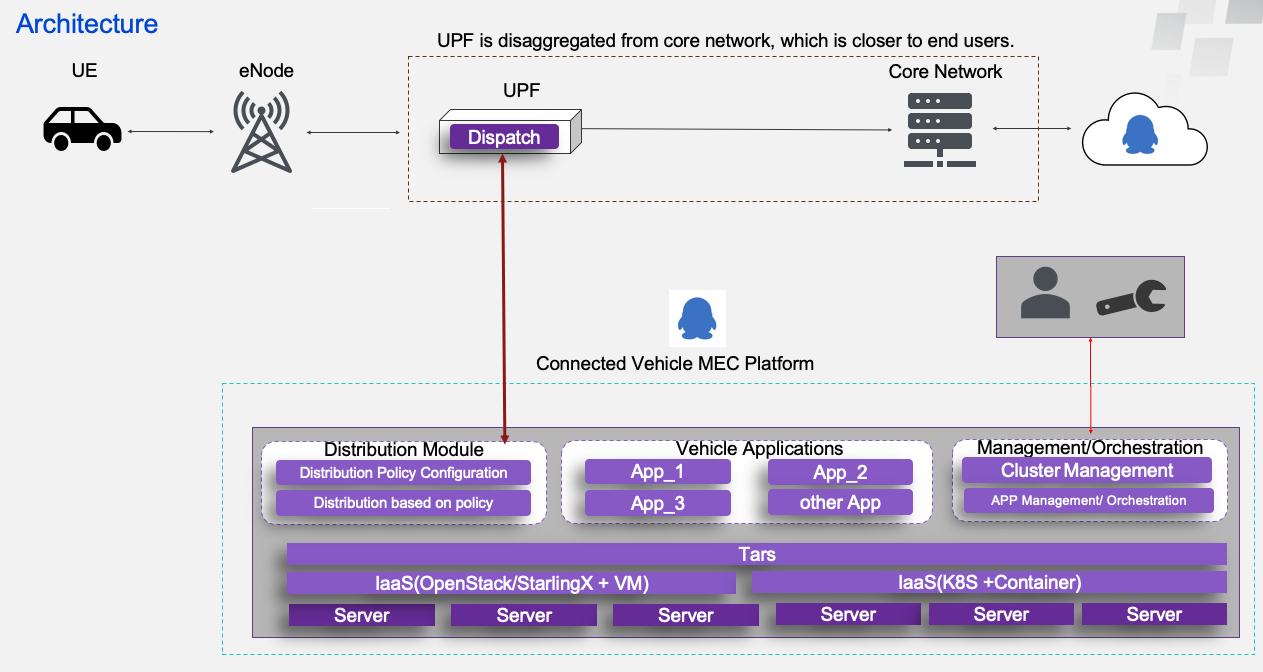
The combination of Commodity Hardware and IaaS Software provides flexible deployments, like Bare Metal, Virtual Machine as well as Container.
Tars is a microservice framework that can manage/monitor/deploy the connected vehicle applications in the edge and data center. Tars can be flexibly deployed in Bare Metal, Virtual Machine as well as Container.
Connected Vehicle Applications are some different applications that fulfill Accurate Location, Smarter Navigation, Safe Drive Improvement and Reduce traffic violations.
The following is the general architecture of Tars, which is a major component in R2.
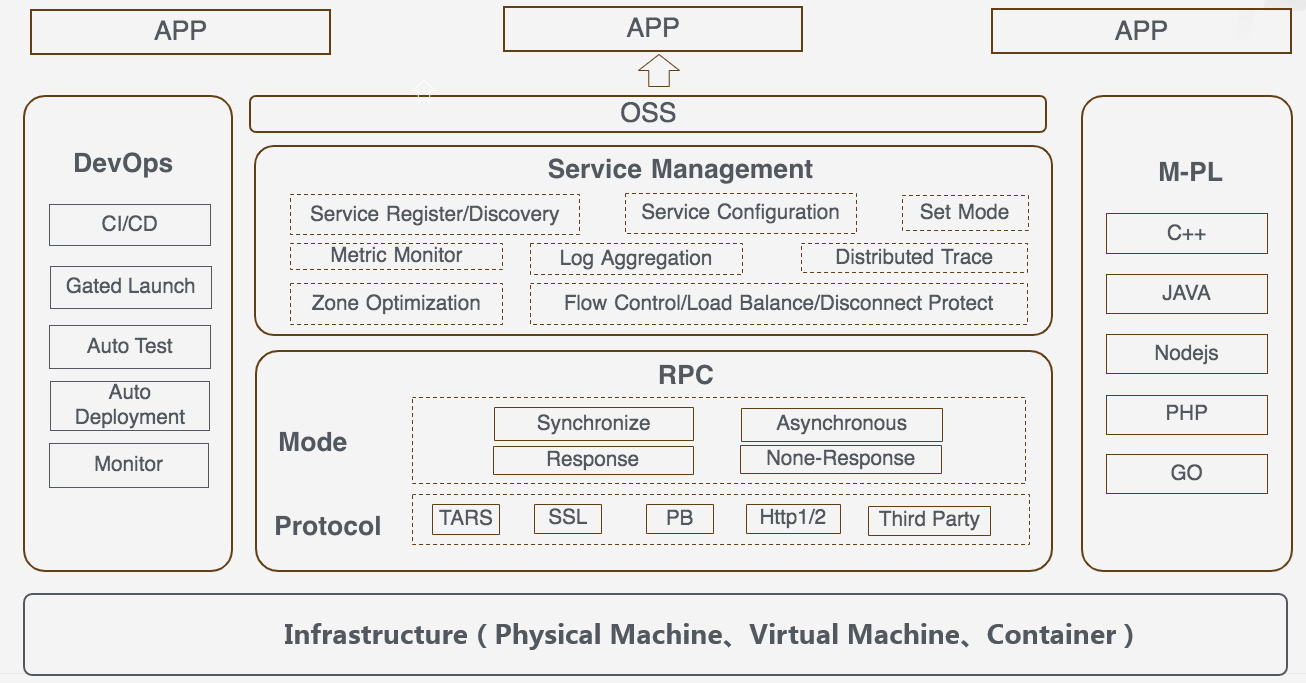
Refer to the enclosed PDF document for the detail Tars introduction.
Main Progresses for Release 2
Release 2 is the first release for Connected Vehicle Blueprint. So everything is new.
Build Of Materials (BOM) / Hardware requirements
Connected Vehicle Blueprint can be flexibly deployed in Bare Metal, Virtual Machine as well as the container.
For R2, we deploy it in Amazon Web Service for Release. The detailed hardware is itemized below:
CPU+Memory | Drive | Deployment |
8Core * 16G | 15G | Jenkins Master |
8Core * 16G | 10+50G | TarsFramework |
8Core * 16G | 10G +20G | TarsNode + Application |
Beyond of AWS, we deploy it in Ampere POD 1 in CI Lab as well.
Notes
Tars is an edge compute microservice platform with low latency, high quality.