Robotics is an important tool for achieving Sustainable Development Goals (SDGs). Workers will be able to focus on creative, non-repetitive work and new innovation. Labor productivity will steadily improve with use of robot, driving new economic growth.
However, there are many industries where it is difficult to apply current robotics. For example, agriculture, restaurant, food preparation and manufacturing, robotaxis, to name just a few. One of the biggest challenges facing the robotics industry is how to control elastic and non-uniform objects under variable environmental conditions and circumstances.
To address this challenge, the Cross-Ministerial Strategic Innovation Promotion Program (SIP) is researching and developing new robot named SSES (Sensor-rich Soft End-Effector System). This blueprint provides a basic architecture and software stack for new robotics based on SSES.
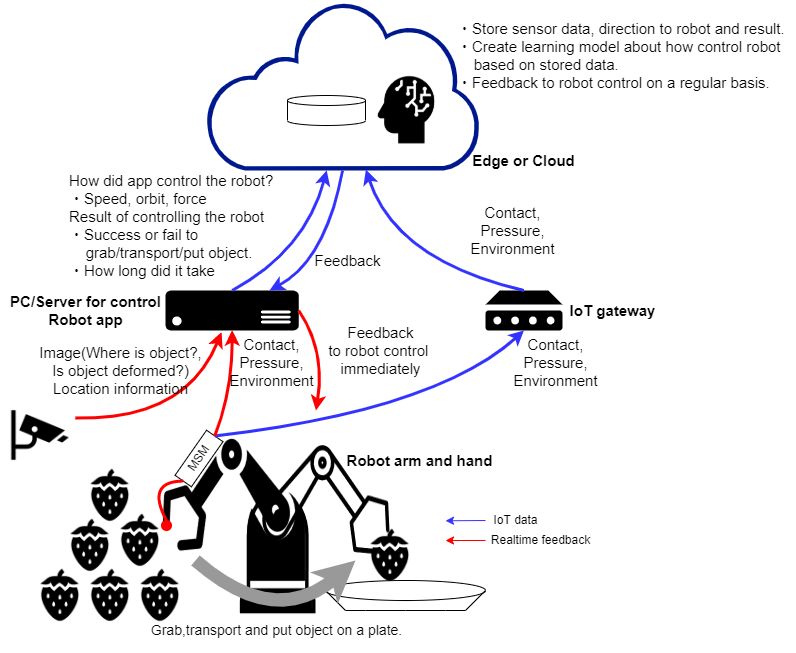
The SSES architecture is characterized by two data flows “real-time feedback flow” and “IoT data flow”. The onboard computer simultaneously distributes the data measured by the sensor in physical space to two systems, the real-time feedback flow “red arrow”and the IoT data flow “blue arrow”. Real-time feedback is directly connected to a PC for robot control and used as sensing data for robot control. Data flow sends data to the edge server cloud via the gateway to analyze data in the cloud (cyberspace) and provide feedback to robot control on a regular basis. In addition, real-time feedback can be controlled using only the signal strength (gradation value) of the sensor signal, but data analysis on the IoT side requires not only the signal strength of the measured value but also a meaning that matches the physical and chemical quantities. The MSM (Multi-Sensor Module) transmits raw data for low latency. The IoT gateway assigns units to measured values and performs scale conversion according to the units. The following diagram shows how these two data flows interact.
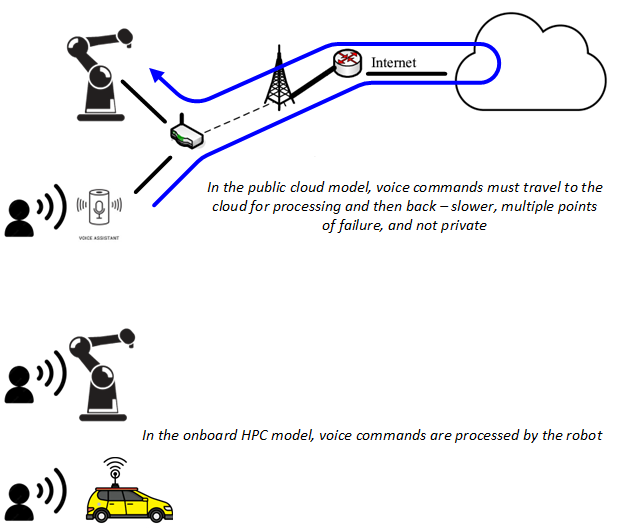
A secondary challenge is safe and reliable human-robot interaction. Robots must respond to safety and emergency commands in a wide range of unpredictable, phrasing, sequence, and stress. To meet this requirement robots need "always available" onboard real-time processing, with multi-thousand word vocabulary. To achieve this onboard – without any dependency on Internet connectivity (and public clouds) – poses an edge computing problem: High Performance Computing (HPC) in very small form-factor and limited power supply.
Robotics Use Cases, Lab Demos, and thread-core data flow diagrams

Project Technical Lead: Fukano Haruhisa
Project Objective:
There are difficult field to apply current robots, i.e. Objects with diverse shapes, flexibility, and frictional properties, Uncertain environment etc.
To solve these problems, this BP approachs are enhancement of cognitive ability and manufacturing new mechanical.
We provide the following.
・hardware architecture(multi sensor module platform, robot arm, edge computer)
・software stack(ROS2, NodeRed etc.)
Project Committers detail:
Committer | Committer Company | Committer Contact Info | Committer Bio | Committer Picture | Self Nominate for PTL (Y/N) |
| Ritsumeikan University | mst21786@fc.ritsumei.ac.jp | ||||
| Ritsumeikan University | |||||
| ZHE QIU | Ritsumeikan University | qiuzhe@fc.ritsumei.ac.jp | |||
| Hannibal Paul | Ritsumeikan University | hpaul@fc.ritsumei.ac.jp | |||
| Fujitsu | iino.hatsumi@fujitsu.com | ||||
| Fujitsu | t_fukuda@fujitsu.com | ||||
| Fujitsu | shigetome.hiroj@fujitsu.com | ||||
| Fujitsu | inoue.reo@fujitsu.com | ||||
| Fujitsu | fukano.haruhisa@fujitsu.com | ||||
| Yasushi Kurokawa | Fujitsu | kurokawa.yasu@fujitsu.com | |||
| Fujitsu | tsuji.yoshiko@fujitsu.com | ||||
| Fujitsu | colin.peters@fujitsu.com | ||||
| signalogic | jbrower@signalogic.com |
Presentation:
Use Case Details:
Attributes | Description | Informational |
Type | New | |
Industry Sector | Robotics, CPS, IoT | |
Business driver | Robotics is an important tool for achieving the SDGs. Workers will be able to focus on decent work and new innovation by improvement of labor productivity using robot, as a result, they can move toward new economic growth.However, there are industries where it is difficult to apply current robotics. For example, agriculture, restaurant, food factory, etc.. The biggest challenge current robotics faces in the industry is how to control elastic and non-uniform object under variable circumstance.To apply robotics to any industry easily, this blueprint family develop and provide open software stack which can achieve the challenge. A secondary challenge is safe and reliable human-robot interaction. Robots must respond to safety and emergency commands in a wide range of unpredictable, phrasing, sequence, and stress. To meet this requirement robots need "always available" onboard HPC, real-time processing, with multi-thousand word vocabulary. To achieve this onboard – without any dependency on Internet connectivity (and public clouds) – poses an edge computing problem. | |
Business use cases | Agriculture、restaurant、food factory | |
Business Cost - Initial Build Cost Target Objective | Depends on use case. In case of Autonomous Mobile Robot which has robot arm. Hardware(Robot and computer) : approx. $100K System Integration : approx. $100M | |
Business Cost – Target Operational Objective | Approx. $20K~40K/year | |
Security need | Industrial robots need safety fences and area sensors | |
Regulations | Examples in the food industry : ・Standards for utensils, containers and packaging in the Food Sanitation Law ・Prevention of foreign matter contamination ・Waterproofness etc.. | |
Other restrictions | NA | |
Additional details | NA |